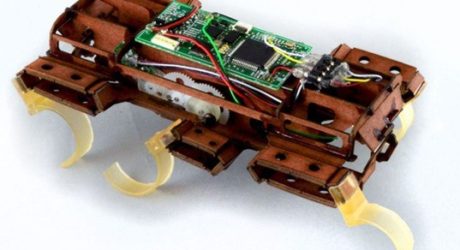
The goal of the research on bioinspired robots at the Biomimetic Millisystems Lab is to harness features of animal manipulation, locomotion, sensing, actuation, mechanics, dynamics, and control strategies to radically improve millirobot capabilities. Research in the lab ranges from fundamental understanding of mechanical principles to novel fabrication techniques to system integration of autonomous millirobots. The lab works closely with biologists to develop models of function which can be tested on engineered and natural systems. The lab’s current research is centered on all-terrain crawling using nanostructured adhesives and bioinspired flight.
For more information please visit:
http://robotics.eecs.berkeley.edu/